025-87793282-8003 18061654911
nbit@nbit6d.com

座机:025-87793282-8003
手机:18061654911
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼
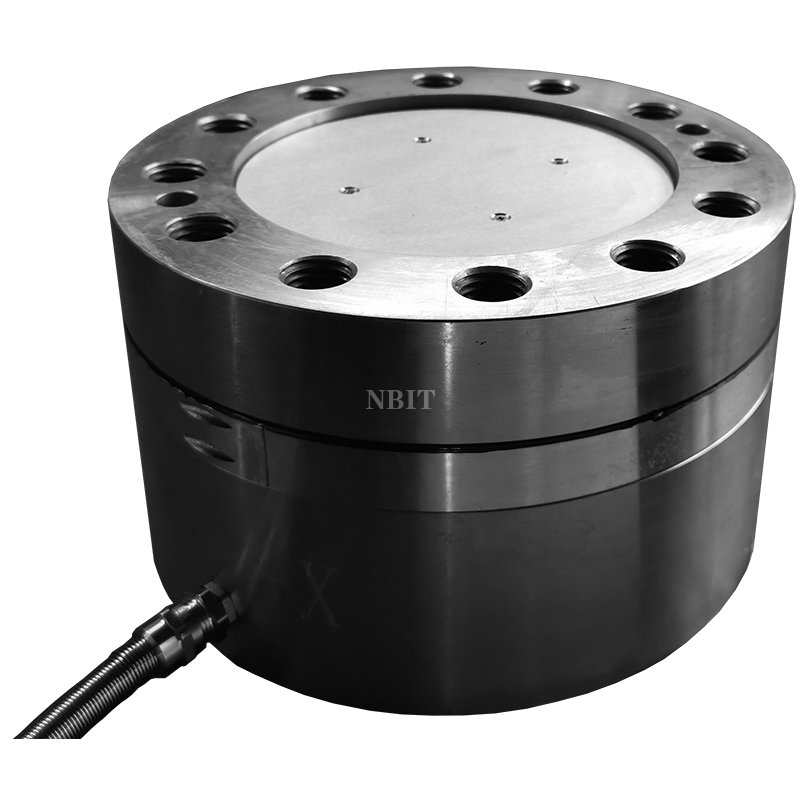
在现代科技不断向智能化、精细化迈进的进程中,对力的感知与测量成为众多领域突破发展的关键。六维力传感器,凭借其独特的技术特性,能够同时测量空间中三个方向的力(X、Y、Z 轴)和三个方向的力矩(绕 X、Y、Z 轴的旋转力矩),如同赋予设备敏锐的 “触觉神经”,在机器人技术、自动化生产、生物医学研究等多个前沿领域,发挥着不可替代的重要作用。
六维力传感器的工作原理融合了材料力学、弹性力学和微电子技术。其核心是弹性体结构,当外部力或力矩作用于传感器时,弹性体会发生微小形变。这种形变与所受力或力矩的大小、方向存在确定的函数关系。在弹性体表面粘贴的应变片(或内置的压电元件、电容式敏感单元等)能够捕捉到这些微小形变,并将其转换为电信号。通过特定的信号处理电路和算法,对这些电信号进行分析和计算,解算出六个维度的力和力矩信息。
从结构设计来看,六维力传感器的形式多样,常见的有基于应变片的桥式结构、基于压电材料的悬臂梁结构以及基于电容原理的平行板结构等。桥式结构通过巧妙设计弹性体的形状和应变片的布局,能够有效提高传感器的灵敏度和抗干扰能力;压电式结构利用压电材料的正压电效应,将力和力矩产生的压力转换为电荷信号,具有响应速度快、频响范围宽的特点;电容式结构则依靠电容极板间距或面积的变化来感知弹性体的形变,具备高精度、稳定性好的优势。这些不同的结构设计,为满足不同应用场景的需求提供了多样化的选择。

六维力传感器的技术优势十分显著。先是高维度测量能力,能够全面获取力和力矩的信息,相比传统的单维或多维力传感器,极大地提升了对复杂力学环境的感知能力。其次,高精度是其重要特点,通过优化弹性体设计、采用高性能敏感元件以及先进的信号处理算法,测量精度可达到毫牛甚至微牛级别,满足精密操作的需求。此外,快速的动态响应能力使其能够实时捕捉力和力矩的瞬态变化,在高速运动或动态交互场景中发挥关键作用。同时,传感器还具备良好的抗干扰能力,能够在复杂电磁环境或振动环境下稳定工作。
在实际应用场景中,六维力传感器展现出强大的实用价值。在机器人领域,它是机器人实现力控操作的核心部件,如机器人在进行精密装配、打磨抛光、人机协作等任务时,通过六维力传感器感知与工件或环境的接触力和力矩,实现精准的力控动作,避免因用力过大损坏工件或发生安全事故。在自动化加工领域,安装在机床刀具或工件夹具上的六维力传感器,能够实时监测切削力和力矩的变化,为优化加工参数、提高加工质量和延长刀具寿命提供数据支持。在生物医学研究中,六维力传感器可用于测量人体关节的受力情况,辅助分析运动生物力学,为康复治疗、运动训练和医疗器械研发提供重要依据。此外,在航空航天、海洋探测等领域,六维力传感器也发挥着重要作用,用于测量飞行器的空气动力、水下机器人的操作力等。
随着人工智能、物联网等技术的飞速发展,六维力传感器正朝着更高精度、更高集成度、智能化的方向发展。未来,它将与其他传感器和智能算法深度融合,为智能设备赋予更加敏锐和精准的 “触觉”,在更多领域创造新的应用价值,推动各行业向更高水平迈进。