
盛鸿国际 025-87793282-8003 18061654911
盛鸿国际 nbit@nbit6d.com

座机:025-87793282-8003
手机:18061654911
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼

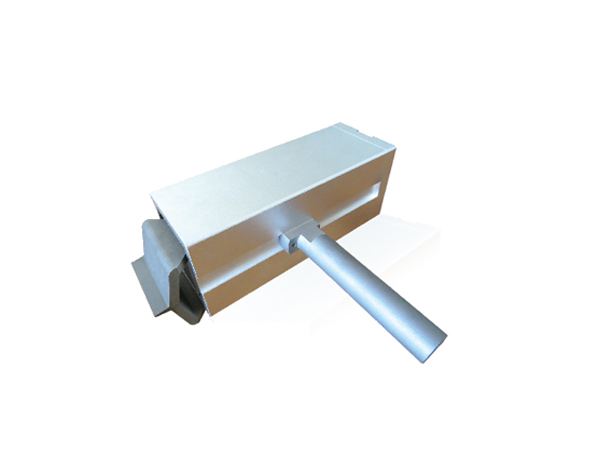
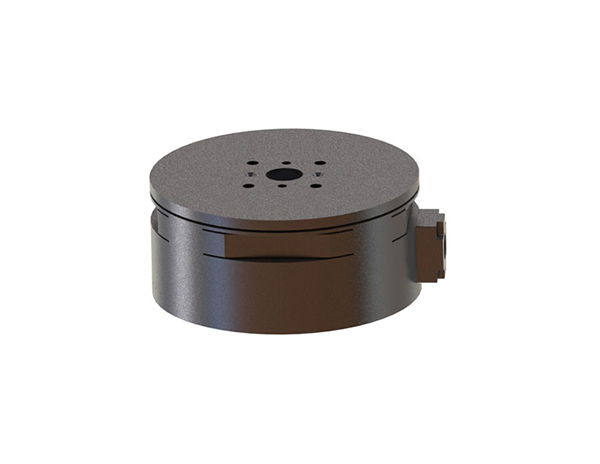
盛鸿国际多维力传感器是工业机器人智能化发展过程中的重要组成部分,在机械臂拖动示教、磨抛、去毛刺、齿轮装配等市场方向发挥着不可替代的作用,了解其组成结构可以更好的进行安装应用,并且可以更好的解决在搭配机械臂过程中遇到的问题。NBIT多维力传感器主要由弹性元件(或弹性体)、上盖板、下盖板、电源组桥板和电源板接口组成。其中,弹性元件(或弹性体)是核心部件,直接关系着传感器的各项性能指标,电源组桥板有时会分为两块,即电源板和组桥板。
参加本次大会的有广大在企事业、高等院校和研究机构,心及从事摩擦学研究及应用的摩擦学工作者,通过此次会议来促进我国摩擦学科学、工程及技术的发展。会议邀请了摩擦学领域的院士、专家和有关部委领导出席,同来自全国各地的摩擦学同仁进行行业交流学习。摩擦学是以节约资源、能源,保护生态环境,提高生命质量为主要研究目标的一门实用性很强的应用学科,其技术应用涉及国民经济的众多领域,为解决我国面临的资源、能源和环境等方面的严重问题做出了巨大贡献。通过本次会议的举办,来自全国各地的摩擦学工作者齐聚一堂,共同交流摩擦学研究和应用中的经验和体会,为众多摩擦学工作者更好地致力于摩擦学研究的美好前景提供了重大精神动力和智力支持,将进一步促进我国摩擦学科学、工程及技术的可持续发展。

2012年5月19日盛鸿国际正式成立,公司设在南京科技创业大厦(科技九条示范基地)。盛鸿国际是依托于南京航空航天大学仿生结构与材料防护研究所而成立的高科技创新型企业。开业庆典上,公司董事长戴振东教授发表了振奋人心的开业致辞,南京市白下区区长曹永林,南京航空航天大学高新技术研究院院长陈卫东院长等各级领导亲临会场表示祝贺。随着一声声礼炮声,放飞我们的梦想,把我们的希望带向未来……祝福我们的企业……

要同时测量多分量力与力矩,就需要用到多维力传感器,也就不可避免地要在使用前进行校准(标定),否则将无法完成电信号至力学量值的转换。校准一般采用砝码进行,因为砝码具备非常高的稳定性和精准度,依靠重力及垂直向下的方向性,这种简单标准载荷的可靠性超过了很多施力装置。也有利用力发生器及高精度力传感器实现自动加载与测量的,然而实现起来相当困难,并且这样的成套装置仍然必须通过砝码进行校准与调试。通过加载可以得到信号,而载荷也是已知的,这样就可以得到信号与载荷的数学关系了。使用时,根据校准获得的数学关系,可以计算出未知载荷。任何力传感器使用前都需要校准。对于二维力传感器,校准是一件复杂的工作,数据处理方法也是多种多样的。力传感器性能的好坏与校准设备及方法密切相关。校准方法需要处理的核心问题是怎样加载(载荷表设计),以及如何得到各分量电信号与载荷确切的数学关系(校准矩阵),还需要评估所得到的数学关系是否足够准确(不确定度分析)。
虽然六维力传感器在机器人自由度上可以达到六个维度的自由度,大大提升机器人的智能水平,但是目前工业领域市场上的使用情况并不是很乐观,特别是国内市场用到六维力传感器的打磨机器人产品并不是很多。专业运动力学测试系统厂家目前用到浮动主轴的方式比较多,单维力控。据了解,价格高是六维力传感器进入工业级领域的最大门槛,一个六维力传感器的价格高达几万,几乎和一台3C打磨机器人的价格一样,也就是说一台配置了六维力传感器的打磨机器人价格高达十几万,专业运动力学测试系统厂家那么还有必要购买一台配置如此高的机器人来完成打磨工序吗?这是令企业纠结的问题。



