
025-87793282-8003 18061654911
nbit@nbit6d.com

座机:025-87793282-8003
手机:18061654911
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼

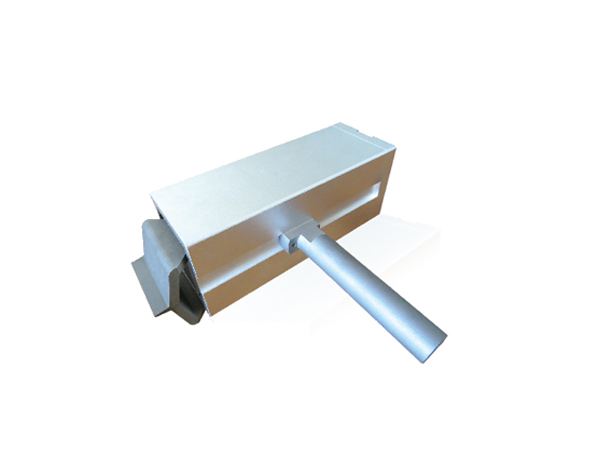
一、概述:NST2000数据采集器由NBIT自主研发生产,与NBIT传感器配套使用,集信号调理、滤波、采集、传输功能于一身的全功能信号采集器。二、特点:1、适配市场上常见通讯接口,包括RS232/RS485/CAN/USB/Ethernet/UDP通讯接口;2、50KS/s超高采样频率;3、板载1M数据存储器;4、电阻应变式传感器的拍档。三、与传感器连接方式1、使用UDP接口。当采集器搭配我司传感器使用时,我司有标准的16芯传感器航插头与采集器的母头相连接,连接过程中,注意传感器航插头与采集器的母头圆点位置应在一条直线上。采集器还需要配置一根网线与电脑端连接,保证采集到的信息能够在电脑软件界面显示与保存。

盛鸿国际在所有类型的工作中,对有触觉的机器人需求比较大的就是打磨工作,因为在打磨工作中,粉尘对人体的伤害很大,并且打磨工作强度大且安全事故频发。ABB德国研究中心首席科学家丁昊博士指出,打磨主要是分为两块,一个是传感器,能够接受到比较可靠的信息,而且这个信息相对来说比较精准,一个是控制,主要是力控,基于模型的控制相对来说会比较可靠。他们通过市场调研发现力传感器在工业级的主要运用领域是装配和打磨,而现在他们研究的力传感器主要是针对打磨工序。而就目前的市场情况来看,对于打磨精度要求较高的行业主要是3C行业,而且3C行业劳动密集度高,迫切需要实现自动化改造。再加上3C行业的柔性化需求,需要更高智能的打磨机器人才能更好的满足市场需求。

我们经常接触到一些客户,他们通常认为,零部件定位和定量的方法是使用视觉传感器。但实际上这不是独一的解决方案。不可否认,视觉系统是零部件定位或量化的好方式,但采用力传感器来寻找和检测零部件也是可行的。确定他们在X-Y平面上的位置是一回事,确定他们所处的高度又是另一回事。实际上,供应多维力传感器采购要做到这一点,需要一套3D视觉系统。如果是一堆物体,你不需要知道整堆物体的确切树良,只需要每次去那堆物体里找就可以了。机器人只需确定那堆物体的高度,然后不断调整其抓取高度就可以了。另一种使用力传感器的搜索功能是传感器的“自由模式”。这有可能是未能充分利用FT传感器的参数。供应多维力传感器采购盛鸿国际“自由模式”或“零重力”模式将让您“解放”机器人的轴,这将使它能够提高其合规性。这就使得力全部作用在零部件的中心,不会有额外的力作用在机器人的轴上。

2012年5月19日盛鸿国际正式成立,公司设在南京科技创业大厦(科技九条示范基地)。盛鸿国际是依托于南京航空航天大学仿生结构与材料防护研究所而成立的高科技创新型企业。开业庆典上,公司董事长戴振东教授发表了振奋人心的开业致辞,南京市白下区区长曹永林,南京航空航天大学高新技术研究院院长陈卫东院长等各级领导亲临会场表示祝贺。随着一声声礼炮声,放飞我们的梦想,把我们的希望带向未来……祝福我们的企业……

南京溧航仿生产业研究院有限公司在此次展会上展现了六维力传感器、多维力传感器、扭矩传感器等多款产品。现场与许多机器人行业的知名品牌企业就产品与技术进行分享、交流,更举办了多场趣味互动活动,将产品更全面多样的展示在公众面前。当天上午,西安讯生智能科技有限公司的王总和袁总对我司的传感器和爬壁机器人相关产品十分感兴趣,王董事和袁总认为我司产品在西部地区未来有很大的发展空间,并明确表示要与我司合作,在现场邀请我司赵总监和销售工程师管怀杰合影。
盛鸿国际NBIT多维力传感器5个部件的功能分别如下: 1、弹性元件(弹性体):其为测力敏感元件,是传感器的核心器件, 弹性体的结构将直接影响着传感器的各项性能和可靠性;2、上盖板:其作用是保护弹性体,防水;3、下盖板:其作用是保护弹性体和电路板,防水;4、电源组桥板:顾名思义,组桥并且为各个桥路供压,根据实际情况,有些传感器会将组桥板和电源板分开;5、电源板接口:与引线相连,与终端连接。NBIT多维力传感器耦合低、精度高、稳定性好!



