
025-87793282-8003 18061654911
盛鸿国际 nbit@nbit6d.com

座机:025-87793282-8003
手机:18061654911
邮箱:nbit@nbit6d.com
地址:南京市江宁区诚信大道509号7号楼1楼

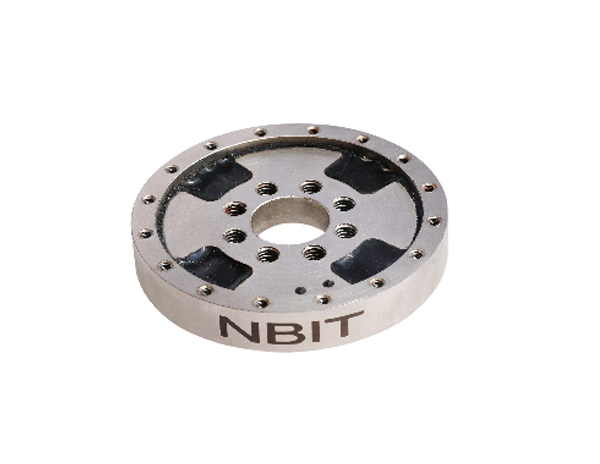
盛鸿国际三维力传感器原理:三维力传感器基f应变式测力传感器的基础上采用电阻应变式原理,也称应变式三维力传感器。有弹性元件、电阻应变计和惠斯通电桥电路组成。被称物体的重量作用在弹性元件上使其变形而产生应变量,粘贴在弹性元件上的电阻应变计将于物体重量成正比的应变量转化为电阻变化,再通过惠斯通电桥电路将电阻变化转化为电压输出,通过显示仪表将测得此电压输出值即可完成测量计量任务。三维力传感器应用特点:三维力传感器可以同时检测三个方向的力值变化情况,X轴、Y轴、 Z轴(垂直力)。同时输出三组电压信号,该传感器有三种测量载荷可选(每通道),可以通过多通道 显示仪表显示数据值。

在所有类型的工作中,对有触觉的机器人需求比较大的就是打磨工作,因为在打磨工作中,粉尘对人体的伤害很大,并且打磨工作强度大且安全事故频发。ABB德国研究中心首席科学家丁昊博士指出,打磨主要是分为两块,一个是传感器,能够接受到比较可靠的信息,而且这个信息相对来说比较精准,一个是控制,主要是力控,基于模型的控制相对来说会比较可靠。他们通过市场调研发现力传感器在工业级的主要运用领域是装配和打磨,而现在他们研究的力传感器主要是针对打磨工序。而就目前的市场情况来看,对于打磨精度要求较高的行业主要是3C行业,而且3C行业劳动密集度高,迫切需要实现自动化改造。再加上3C行业的柔性化需求,需要更高智能的打磨机器人才能更好的满足市场需求。

南京溧航仿生产业研究院有限公司成立于2017年12月,致力于技术创新及产业化、孵化创新企业。企业孵化方面,公司从技术支持、市场开拓、运营场所、行政管理等多方面为孵化企业提供服务,已孵化南京中科特检、南京雅博鼎新、南京神源生、南京皓焜等多家企业,并计划每年孵化6-10家企业。2019年4月,ESRL主任John Hallam教授,携Manoonpong教授、熊小峰博士及丹麦技术研究院Bridget Hallam主任来南京,与溧水区、仿生产业研究院签订了全面合作协议。5月5日上午,在南京市新型研发机构建设现场推进会上,我司作为溧水区新型研发机构代表参加了此次活动,并且我司通过了今年第一批市级备案。
要同时测量多分量力与力矩,就需要用到多维力传感器,也就不可避免地要在使用前进行校准(标定),否则将无法完成电信号至力学量值的转换。校准一般采用砝码进行,因为砝码具备非常高的稳定性和精准度,依靠重力及垂直向下的方向性,这种简单标准载荷的可靠性超过了很多施力装置。也有利用力发生器及高精度力传感器实现自动加载与测量的,然而实现起来相当困难,并且这样的成套装置仍然必须通过砝码进行校准与调试。通过加载可以得到信号,而载荷也是已知的,这样就可以得到信号与载荷的数学关系了。使用时,根据校准获得的数学关系,可以计算出未知载荷。任何力传感器使用前都需要校准。对于二维力传感器,校准是一件复杂的工作,数据处理方法也是多种多样的。力传感器性能的好坏与校准设备及方法密切相关。校准方法需要处理的核心问题是怎样加载(载荷表设计),以及如何得到各分量电信号与载荷确切的数学关系(校准矩阵),还需要评估所得到的数学关系是否足够准确(不确定度分析)。

要同时测量多分量力与力矩,就需要用到多维力传感器,也就不可避免地要在使用前进行校准(标定),否则将无法完成电信号至力学量值的转换。校准一般采用砝码进行,因为砝码具备非常高的稳定性和精准度,依靠重力及垂直向下的方向性,这种简单标准载荷的可靠性超过了很多施力装置。优质运动力学测试系统采购也有利用力发生器及高精度力传感器实现自动加载与测量的,然而实现起来相当困难,并且这样的成套装置仍然必须通过砝码进行首次校准与调试。使用时,根据校准获得的数学关系,可以计算出未知载荷。任何力传感器使用前都需要校准。优质运动力学测试系统采购对于多维力传感器,校准是一件复杂的工作,数据处理方法也是多种多样的。力传感器性能的好坏与校准设备及方法密切相关。
盛鸿国际虽然六维力传感器在机器人自由度上可以达到六个维度的自由度,大大提升机器人的智能水平,但是目前工业领域市场上的使用情况并不是很乐观,特别是国内市场用到六维力传感器的打磨机器人产品并不是很多。目前用到浮动主轴的方式比较多,单维力控。据了解,价格高是六维力传感器进入工业级领域的最大门槛,一个六维力传感器的价格高达几万,几乎和一台3C打磨机器人的价格一样,也就是说一台配置了六维力传感器的打磨机器人价格高达十几万,那么还有必要购买一台配置如此高的机器人来完成打磨工序吗?这是令企业纠结的问题。



